软件详情:
车辆牌照识别系统(LPR)一般可顺序分为车辆图像获取,车辆牌照子图像定位与分割,字符识别(OCR)3大部分。
车牌定位算法的理论要点:
1.1 灰度化
一般拍摄的车辆图像都是24位彩色图像,需转换为灰度图。方便后续的图像快速处理。有公式:
g=0.3R+0.59g+0.11B
1.2 灰度拉伸
灰度拉伸,也称为对比度拉伸,是一种简单的线性点运算。即将感兴趣的灰度范围拉开,使得该范围内的像素,亮的越亮,暗的越暗,从而达到增强对比度的目的。在车牌处理中,这样更有利于相应的边缘检测。
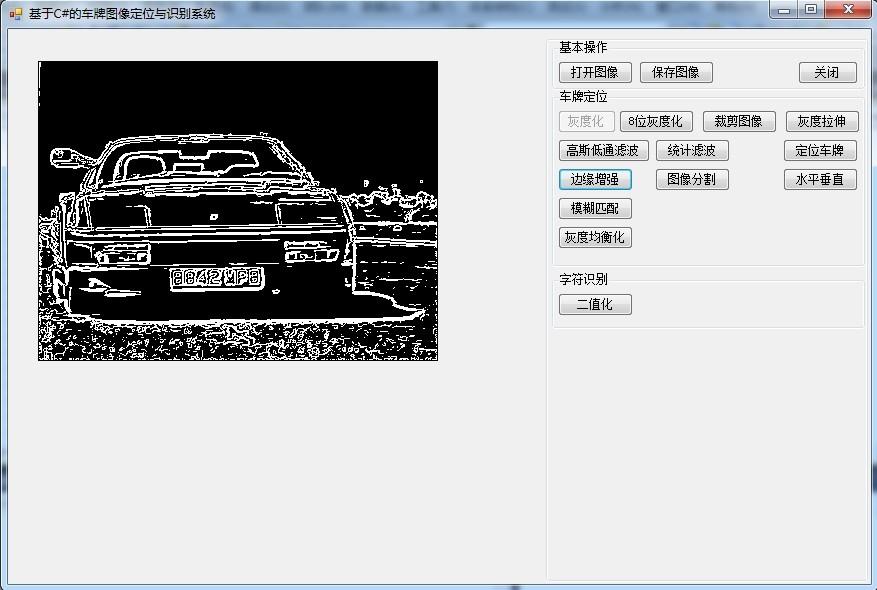
1.3 边缘检测
Canny边缘检测的原理:
Canny边缘检测方法分为4步:
(1) 用高斯滤波器对图像进行平滑处理。
(2) 利用一阶偏导算子找到图像灰度沿着水平方向和垂直方向的偏导数,并求出梯度的赋值G和方位θ。
(3) 对梯度幅值进行非极大值抑制,即找到局部梯度最大点。
(4) 用双阈值算法检测和连接边缘。
运行环境及注意事项:
1、编程工具:VS2010
2、运行环境:win64
3、运行步骤:直接打开工程文件,F5运行即可
4、注意:本程序仅仅实现了8位灰度化,灰度拉伸,高斯低通滤波,边缘增强等基本的功能,车牌图像分割和识别等功能还未实现。
评论(0)